How to submit your final submission
Submit final submissions by the end of the contest (see "submission_details.pdf")
Please upload the file to Dropbox, GigaFile, or other online service and submit the necessary information for downloading.
Application form is here.
* Please make sure the SD card size is 32GB or less.
news
3/13 The videos of the awards ceremony and winners' presentations have been uploaded to YouTube.2/3 We have started accepting applications for the award ceremony and winners' presentations (held at 16:00 on March 8). If you would like to participate, please register here.
2/1 We are asking everyone who participated in the contest to fill out a questionnaire to help us manage future contests. Thank you for your cooperation in answering here.
12/22 Although there are only a few boards left, we have decided to extend the 4th board provision review (deadline 1/4). If you are interested, please apply from here.
12/9 We have some boards in stock, so we decided to conduct an additional board review (deadline 12/16). If you are interested, please apply from here.
12/1 The schedule for the awards ceremony has been decided on 2023/3/8 (Thu) 16:00.
11/22 We have released the annotation correspondence table.
11/7 We have started accepting board provision review (3rd round). If you are interested, please apply from here.
10/31 Corrected part of the notation of the site. (Before) Lider data of a vehicle front camera (After) 360 degree point Lider data of a vehicle
10/13 We have started accepting online seminars (11/18). If you would like to participate, please register here.(Same content as the seminar on 9/27)
10/6 Seminar video was released in the tutorial.
10/4 We have started accepting board provision review (2nd round). If you are interested, please apply from here.
10/3 The reference environment (hardtware) was released in the tutorial.
9/27 Documents of online seminar to explain the reference implementation was released in the tutorial.
9/21 We will change the recommended board to SK-KV260-G-ED and SK-KV260-G.
9/16 A reference environment (software) using the distributed data of this contest has been released in the tutorial.
9/13 We have started accepting online seminars (9/27). If you would like to participate, please register here.
9/8 We have started accepting board provision review (1st round). If you are interested, please apply from here.
9/2 We are considering changing the recommended boards to SK-KV260-G-ED and SK-KV260-G. Board provision review will be implemented in stages, and the first is scheduled for the end of September.
8/31 The reference environment (software) was released in the tutorial.
Purpose
With the progress of artificial intelligence (AI) technology, social implementation such as image recognition using AI technology, automatic driving, and natural language processing is rapidly progressing. Especially in the edge computing field, since it is necessary to realize AI technology with higher efficiency, startups mainly in the United States and China and major vendors are accelerating their entry into AI hardware, and even in Japan Not only that, there is an urgent need to develop human resources and industries for hardware to accelerate AI processing such as LSI and FPGA.
In addition, it is seen the recent growing oligopolistic in embedded processors with the rigidity of prices as a challenge.
Given this background, under the theme of "RISC-V" which is open source and does not require licensing fees, this contest sets the task of developing a system including hardware and software (network model and system optimization) equipped with RISC-V chips, in addition to the conventional AI technology development focusing on software, and is designed to develop human resources and startups with AI hardware in mind, as well as to foster industries that utilize these technologies.
In this contest, we will provide a reference environment for software and hardware as well as various types of support. We hope that you will use them as a starting point for your challenge in the field of edge computing.
AI Edge Contest Official WebsiteSpecial Website for the 6th AI Edge Contest
AI Edge Contest Official Twitter
Contest Outline
| Subject |
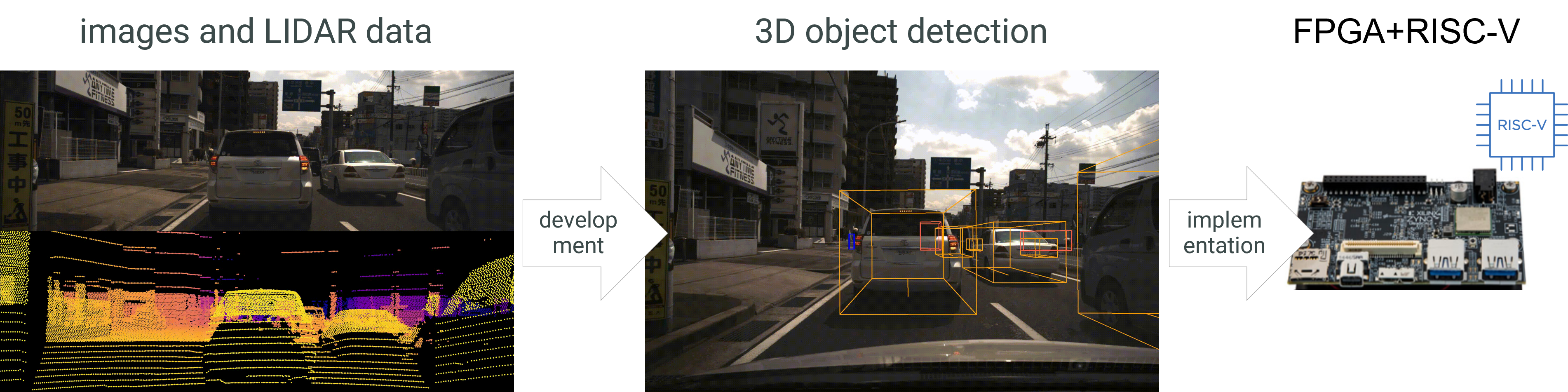
(Algorithm development) Create an algorithm for 3D object detection from images and LIDAR data of a vehicle front camera (Algorithm implementation) Design hardware accelerators and implement algorithm on the target platform equipped with RISC-V. | |
| Provided data | Images of a vehicle front camera 360 degree point Lider data of a vehicle Labeled 3D bounding boxes and categories of objects | |
| Identifying target | Car, Pedestrian | |
| Implementation | Using RISC-V in the processing of object tracking | |
| Platform | Any FPGA board and boards with RISC-V in addition to the Ultra96 board |
|
| Final result set | Source code, area report, implementation approach, processing performance, etc. |
|
| Evaluation | Evaluated by reviews for overall points for completeness (qualitative), accuracy (quantitative), and speed of operation (quantitative) |
|
| Prize. | Outstanding Performance Award: 1st Prize: 1,000,000 yen + Google Cloud Platform Coupon (200,000 yen) + Sakura Cloud Coupon (200,000 yen), Trophy 2nd Prize: 600,000 yen + Google Cloud Platform Coupon (10,000 yen) + Sakura Cloud Coupon (100,000 yen), Trophy 3rd Prize: 300,000 yen + Google Cloud Platform Coupon (50,000 yen) + Sakura Cloud Coupon (50,000 yen), Trophy Special Jury Prize 300,000 yen + Google Cloud Platform Coupon (50,000 yen) + Sakura cloud Coupon (50,000 yen), Trophy Web Article Prize: Share total 40,000 yen Amazon gift card among Web Article Winners (up to 10 teams) |
|
Subject
You are required to create an algorithm for object detection using a 3D bounding box on image data and point cloud data acquired by a sensor mounted on a vehicle.
The objects to be detected are as follows.
- Pedestrian: Within 40[m] of the vehicle and containing at least one point cloud
- Car: Within 50[m] of the vehicle and containing at least one point group
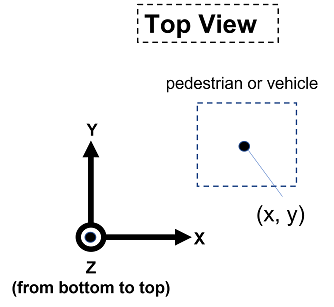
The 3D bounding box is represented by the (x, y) coordinates of its center in the world coordinate system.
Please also refer to the distribution data (readme.md).
Subject (Algorithm Implementation)
Implement the developed algorithm on the target platform equipped with a RISC-V chip.
The section to be optimized and the processing time to be measured is defined as follows.
Time to perform inference processing on the video data loaded in the memory and then convert it to JSON-equivalent information such as the label and 3D bounding box information of each object.
Carefully check the RISC-V usage requirements described in the "Rules" tab before implementing.
Flow of entry
- Download data from the Data tab and develop the algorithm required in the subject (algorithm development)
・It is not necessary to use both image data and LIDAR data. For example, it is acceptable to use both types of data for training and only use image data for inference.
・Please include in the report any points of appeal such as what you put a lot you think into. - Submit source code for developed algorithms
・When you post your inference results from the "Submit" button, you can see the evaluation results (accuracy and inference time) on the leaderboard.
・Leaderboard ratings are not used for the final evaluation. Please use them as a reference.
・Until the end of the contest, you may submit as many times as you like, within the maximum number of times per day. - Implement and optimize the developed algorithm on the environment required by the subject (algorithm Implementation)
・For those who do not have FPGA boards, we plan to offer them after reviewing the status of the initiative.
Application form is here.
* The screening process will also take into account the results of algorithmic submissions.
・Repeat Steps 2 and 3 to optimize. - Submit final submissions by the end of the contest (see "submission_details.pdf")
・Please upload the file to Dropbox, GigaFile, or other online service and submit the necessary information for downloading.
Application form is here.
* Please make sure the SD card size is 32GB or less.
・Please agree to grant an open source license to your submission.
Slack workspace
We have prepared a dedicated Slack workspace for the AI edge contest, so please participate. In addition to information exchange and discussion among participants, it is also possible to use it for recruiting team members and to communicate with sponsoring companies. (link in data tab)














 Participation information is being registered. Please wait for a while.
Participation information is being registered. Please wait for a while.