RISC-Vを使用した自動車走行画像認識
革新的なAIエッジコンピューティングの実現に向けて
「Connected Inductries」や「Society5.0」の実現に大きく貢献するAIなどでは、
大量のデータ処理や十分な計算機資源が必要であり、ハード・ソフト両面において、
既存技術の延長線上にはない新たな技術の実現が求められています。
そこで、「革新的AIエッジコンピューティング技術」及び「次世代コンピューティング技術」に関する研究開発事業の一貫として、
これらの技術における社会実装の1テーマである「自動運転」に着目し、
世界中の技術者・研究者・学生等が挑戦する「AIエッジコンテスト」を開催することで、
新しいアイデアや人材の発掘を目指します。
Contest Overview コンテスト概要
RISC-Vを使用した自動車走行画像認識
開催期間:2021年10月18日 - 2022年2月15日 賞金総額:調整中
人工知能(AI)技術の進歩に伴い、AI技術を用いた画像認識や自動運転、自然言語処理などの社会実装が急速に進んでいます。特にエッジコンピューティング分野ではより、高効率にAI技術を実現する必要があることから、米国・中国を中心にしたスタートアップや大手ベンダーで、AIハードウェアへの参入が加速しており、我が国でもソフトだけではなく、LSI・FPGAを始めとするAI処理を加速するためのハードウェアの人材、産業育成が急務となっています。
こうした背景の中で、これまでのソフトウェアを中心としたAI技術開発に加え、AIハードウェアも視野に入れた人材育成・スタートアップ育成、さらにはこれら技術を活用した産業育成を図るべく、今回のコンテストを実施します。本コンテストでは、現在注目を集めている「RISC-V(リスク・ファイブ)」チップを搭載するAIハードウェア開発を行い、ハードウェア・ソフトウェア(ネットワークモデル及び、システム最適化)を含めたエッジコンピューティングを意識したハードウェアシステム開発を課題として設定します。
| コンテスト概要 | ||
|---|---|---|
| 課題 |
(開発)車両前方カメラの撮影動画から特定の物体を検出し、追跡するアルゴリズムを作成
(実装)開発したアルゴリズムを、RISC-Vを搭載したターゲットのプラットフォームに実装 |
|
| 提供データ | 車両前方カメラ動画、メタデータ(物体の矩形タグ領域など) | |
| 認識対象 | 乗用車、歩行者 | |
| 実装方法 | RISC-Vを実装し、RISC-Vコアを物体追跡の処理の中で使用(詳細はルールタブ参照) | |
| 賞 | 処理速度賞 | アイデア賞 |
| プラットフォーム |
Avnet社 Ultra96-V2 FPGAボード
(Zynq UltraScale+ MPSoC ZAU3EG SBVA484) |
任意の機器 |
| 評価方法 | 対象FPGAボードの処理速度 | RISC-Vの活用アイデア |
| 入賞要件 | 評価用データの物体追跡結果の精度が、MOTA=0.6以上等 | 評価用データの物体追跡結果の精度が、MOTA=0.6を大きく下回る(半分以下)など実用適用が難しくないこと |
| 最終提出物 | ソースコード、エリアレポート、実装アプローチ、処理性能等 | ソースコード、レポート、動作を撮影した動画等 |
| 表彰等 | 調整中(上位3チーム) | 調整中(最大3チーム) |
| 特別賞 | フォーラム活動賞・記事執筆賞 | |
|
調整中(最大3チーム)
(フォーラム活動賞)フォーラムで問題の解決に大きく寄与いただいた方 (記事執筆賞)教育効果の高い記事をブログ等でWeb上に執筆し、フォーラムにリンクを公開した方 |
||
* 入賞要件の詳細は、 評価方法タブ を参照(MOTAの基準値は変更する可能性があります)
Flow コンテストの流れ
-
1
-
2
コンテストに参加
分析用データをダウンロード後、参加規約に同意の上、コンテストに参加します。
コンテスト参加方法
SIGNATEにログインできたら、いよいよコンテストに参加いただく準備が整いました。
コンテストの流れを確認し、入賞を目指して、奮ってご参加ください。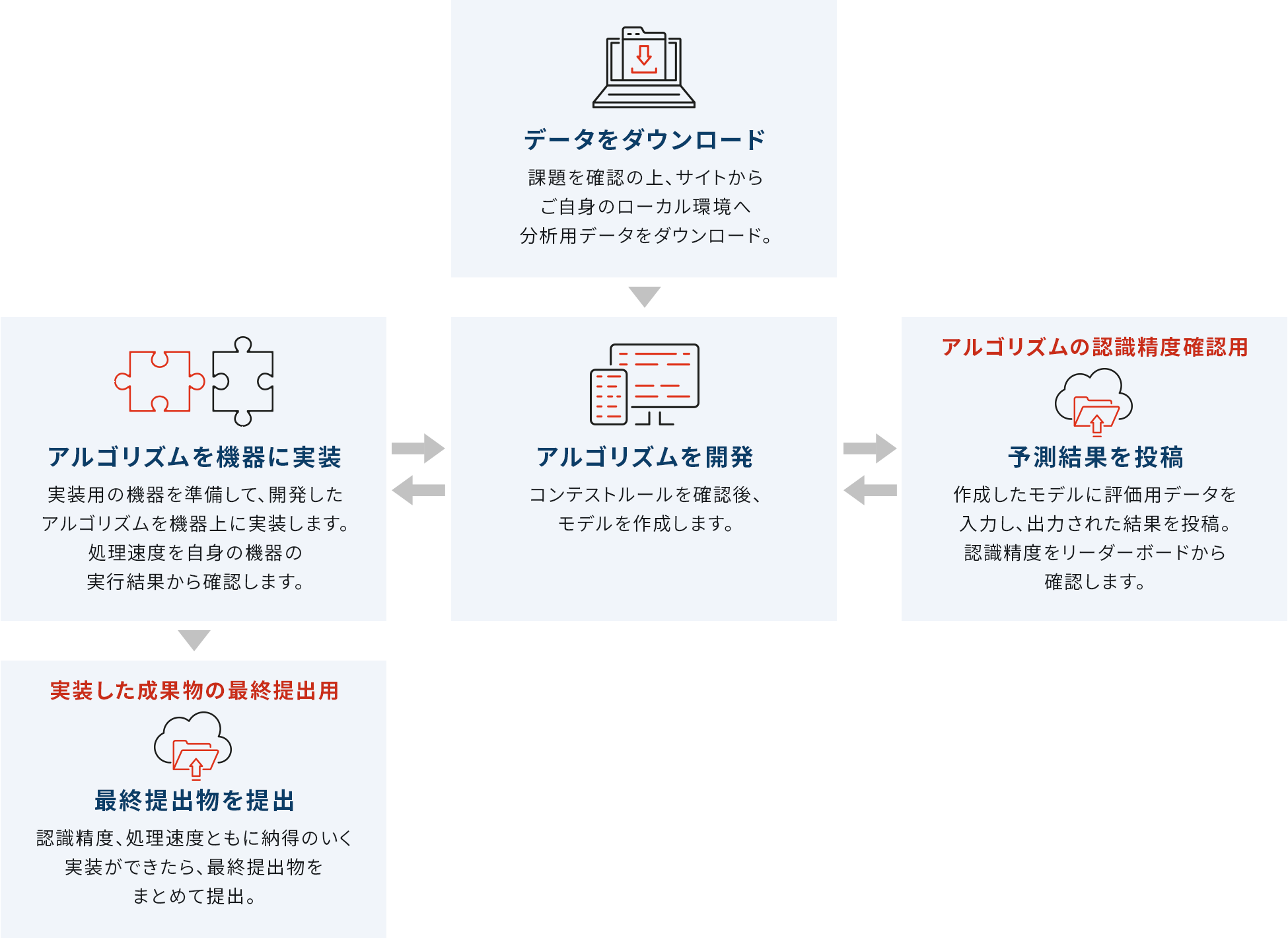
-
3
入賞者決定&表彰式
コンテスト終了後、入賞者は懸賞を獲得し、表彰式で発表します。
過去の表彰式の様子
表彰式では、各部門の入賞者表彰、入賞者プレゼンテーションが行われました。
第2回以降は、オンラインで表彰式が執り行われましたので、各入賞者の解法の工夫点や解決策などを動画で視聴することができます。第1回の表彰式の様子
オフィシャルYoutube
-




Contest Committees コンテストコミッティ
Advisory committee アドバイザリコミッティ
-
金出 武雄氏 カーネギーメロン大学
ワイタカー冠全学教授 -
西脇 光一氏 ウーブン・プラネット・ホールディングス株式会社
Woven Planet Holdings, Inc.
Principal Robotics Researcher -
辻井 潤一氏 産業技術総合研究所
人工知能研究センター
センター長 -
加藤 真平氏 東京大学
情報理工学系研究科 准教授
Steering committee ステアリングコミッティ
-
加藤 真平氏 東京大学
情報理工学系研究科 准教授 -
菅沼 直樹氏 金沢大学
新学術創成研究機構
未来社会想像研究
コア自動運転ユニット
ユニットリーダー 教授 -
松本 浩彰氏 ソニーグループ株式会社
車載事業部
Distinguished Engineer -
大渕 栄作氏 ソニーセミコンダクタ
ソリューションズ株式会社
モバイル&センシング
システム事業部
シニアプリンシパル
エンジニア -
藤吉 弘亘氏 中部大学 工学部
ロボット理工学科 教授 -
本村 真人氏 東京工業大学
未来産業技術研究所 所長 -
中原 啓貴氏 東京工業大学
工学院情報通信系
准教授 -
二宮 芳樹氏 名古屋大学
未来社会創造機構
モビリティ領域
特任教授 -
酒田 輝昭氏 株式会社日立製作所
研究開発グループ
テクノロジーイノベーション統括本部制御・ロボティクスイノベーションセンタ
自動運転研究部
主任研究員 -
小嵜 耕平氏 Preferred Networks
-
須山 温人氏 BOLDLY株式会社
CTO -
平賀 督基氏 株式会社モルフォ
代表取締役社長兼 CEO&CTO
Organizer & Co-sponsored 主催・共催・協賛
主 催
共 催
協 賛
後 援
- IEEEジャパン・オフィス
- 公益社団法人計測自動制御学会
- 一般社団法人人工知能学会
- 一般社団法人電子情報通信学会
- 公益社団法人精密工学会
-
一般社団法人
電子情報技術産業協会 - 一般社団法人日本ロボット学会
 過去の AI Edge Contestはこちら
過去の AI Edge Contestはこちら